Choosing a Camera for Machine Vision on the NVIDIA Jetson Nano
Introduction
On the Jetson Nano, the camera question often turns out to be the harder half of the design. The compute platform tends to be fixed early — it is CUDA-capable, inexpensive, and fits a tight size, weight, and power (SWaP) budget — while the sensor is treated as something to attach later. That ordering is a common source of friction. Because the Nano constrains both I/O and thermal headroom, the camera subsystem and the inference pipeline are arguably best reasoned about together rather than in sequence.
The module is built on the NVIDIA Tegra X1 (T210) SoC. Its core resources are a 128-core Maxwell-architecture GPU, a quad-core ARM Cortex-A57 cluster up to 1.43 GHz, and 4 GB of 64-bit LPDDR4 with roughly 25.6 GB/s of memory bandwidth (a 2 GB variant also exists). The GPU offers on the order of 472 GFLOPS in FP16, exposed through CUDA, cuDNN, and TensorRT, within selectable 5 W and 10 W power envelopes. One detail that is easy to overlook is the integrated hardware Image Signal Processor (ISP) on the Tegra X1: for MIPI CSI-2 inputs it handles debayering, auto-exposure, auto-white-balance, and noise reduction — work the ARM cores or GPU would otherwise carry. That detail colours much of the reasoning that follows.
What the module is actually good at
The Nano's value for vision lies in the GPU and its neighbouring accelerator blocks rather than raw CPU throughput. A few points stand out:
- TensorRT-optimised lightweight CNNs — MobileNet-SSD, ResNet-18, small YOLO variants — run at usable frame rates on low-to-mid resolution input. Heavier backbones at high resolution stop being real-time, and it is safer to assume that from the start.
- The hardware ISP, reached through the
libargus/ Argus API, is the lowest-overhead path from a raw Bayer sensor to a usable RGB/YUV frame on this platform. - For accelerated primitives there is OpenCV (with partial CUDA support), VPI (Vision Programming Interface), and the broader JetPack/L4T stack.
- The dedicated encode/decode blocks matter when recording or streaming runs alongside inference, since they keep that load off the GPU.
The recurring constraint is that the Nano is effectively single-port-bottlenecked: one USB 3.0 SuperSpeed controller, one Gigabit Ethernet MAC. In practice, total ingest bandwidth rather than sensor resolution tends to be the binding limit once a design goes multi-camera or high-frame-rate.
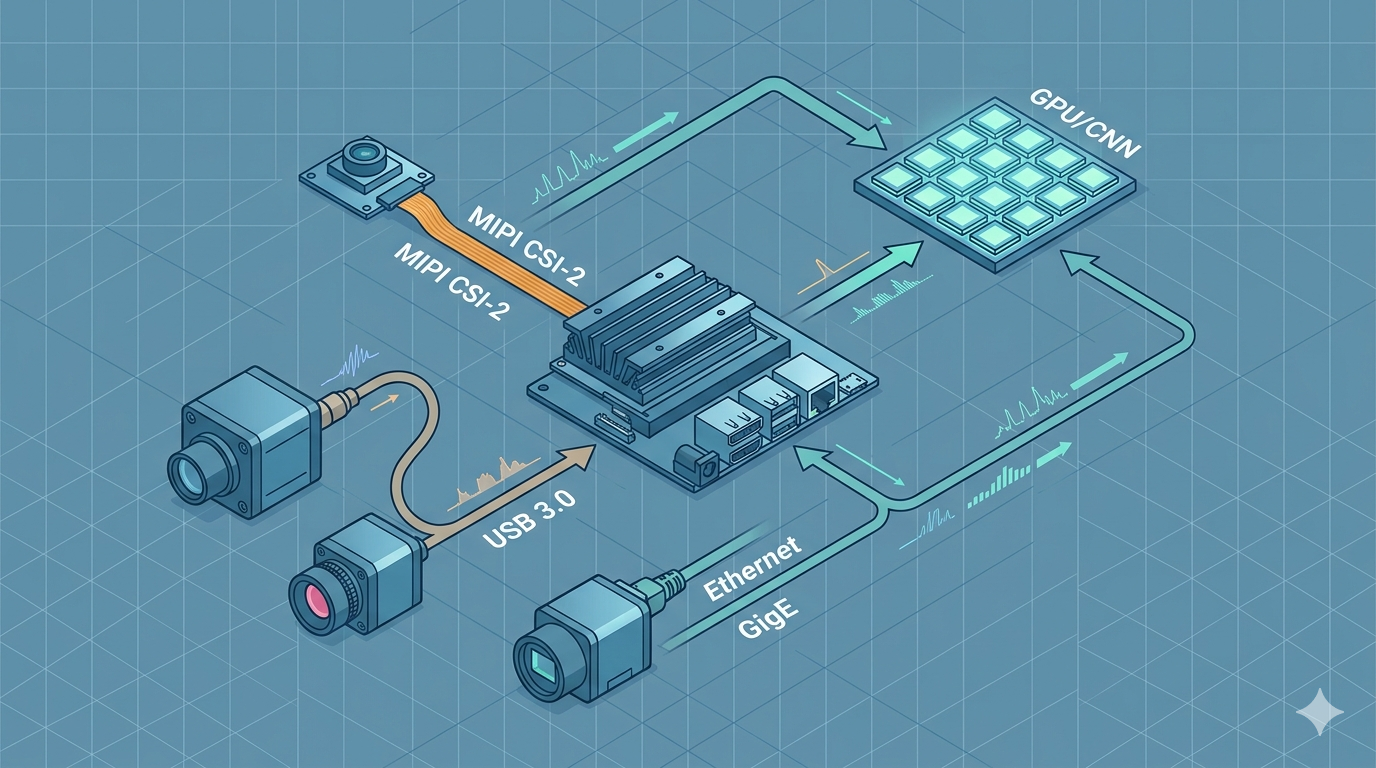
The three transport options, weighed
Three transport classes are in play, and the choice cascades into cable length, processing load, integration effort, and cost more than into image quality as such.
| Interface | Usable bandwidth | Cable length | ISP / processing | Integration effort | Typical cost |
|---|---|---|---|---|---|
| MIPI CSI-2 | High (up to 12 module lanes; B01 dev kit exposes 2× 2-lane connectors) | ~10–30 cm (FFC) | Uses on-chip Tegra ISP | High (V4L2 driver + device tree) | Low |
| USB 3.0 (USB3 Vision / UVC) | ~5 Gbps shared, single port | 3–5 m (active up to ~8 m) | Camera-side or host GPU/CPU; no Tegra ISP | Low (vendor SDK, plug-and-play) | Medium–high |
| GigE Vision | ~1 Gbps (~115 MB/s usable), single port | up to 100 m | Camera-side; no Tegra ISP | Low–medium (vendor SDK) | Medium–high |
MIPI CSI-2 is the path native to the platform. It offers the lowest latency and cost and allows the free hardware ISP to be exploited — but the short cabling and the kernel-driver-plus-device-tree work for any non-reference sensor are real costs that are easy to underestimate. USB3 Vision sits as a pragmatic middle ground: it gives up the Tegra ISP and accepts some host CPU overhead, and in return offers mature industrial SDKs, global-shutter sensors, and near plug-and-play bring-up. GigE Vision trades bandwidth for reach, which makes it attractive where the topology — long cable runs, several distributed nodes — drives the requirement more than throughput does.
Where the platform tends to land in practice
The applications most readily associated with the Nano cluster around moderate bandwidth and lightweight models:
- Edge object detection and classification — retail analytics, people counting, access control.
- Entry-level automated optical inspection (AOI) — presence/absence checks, simpler defect detection, label verification.
- Mobile robotics and AGVs — obstacle detection, line following, visual navigation (the JetBot reference design points squarely here).
- Smart agriculture and environmental monitoring — crop/weed classification, livestock monitoring.
- Traffic and infrastructure monitoring — vehicle counting, ANPR at moderate resolution.
For high-resolution, high-frame-rate, or genuinely multi-camera inspection lines, the Nano begins to look under-provisioned, and the reasoning naturally drifts toward Xavier NX or Orin-class modules. This is less a hard line than the point where the trade-offs stop favouring the Nano.
Camera families worth considering
On the MIPI CSI-2 side (cost-sensitive, embedded), a few recur:
- Raspberry Pi Camera Module v2 — Sony IMX219, 8 MP rolling shutter; probably the most broadly supported reference sensor on the platform.
- Raspberry Pi HQ Camera — Sony IMX477, 12.3 MP, C/CS mount for interchangeable optics.
- Arducam IMX477/IMX519 modules — variants with autofocus and motorised lenses.
- e-con Systems e-CAM — industrial-grade CSI-2 modules with Jetson-specific driver packages, which removes much of the bring-up effort.
- Leopard Imaging LI-IMX477 and relatives — generally well-documented on Jetson.
- Allied Vision Alvium 1500/1800 — industrial sensors with a direct CSI-2 variant, an interesting bridge between machine-vision image quality and the native ISP path.
On the USB3 Vision side (industrial image quality, easy bring-up):
- Basler ace (acA series), for instance the acA1920-40uc — 2.3 MP Sony IMX249 Pregius global shutter, ~41 fps, colour.
- Basler ace 2 (a2A series) — newer Pregius S / STARVIS 2 sensors at higher resolutions.
- Teledyne FLIR Blackfly S USB3 — wide sensor range, GenICam-compliant.
- IDS uEye and The Imaging Source DFK/DMK — alternative industrial USB3 lines worth keeping on a shortlist.
On the GigE Vision side (reach, distribution):
- Basler ace GigE — the same sensor portfolio over Gigabit Ethernet.
- Allied Vision Manta / Mako.
- Teledyne FLIR Blackfly S GigE.
A closer look at the Basler ace
The Basler ace family is an easy default when a project leans industrial, and it is worth being explicit about why — and about where that default has limits.
The appeal is fairly concrete. The line sits on Sony Pregius and STARVIS sensors, with both global- and rolling-shutter options; the global-shutter availability is the part that weighs most, since it removes the motion skew rolling-shutter CSI modules introduce on conveyors and moving parts. The pylon SDK ships official 64-bit ARM (aarch64) builds that match the Nano's L4T/Ubuntu environment, which sidesteps most of the driver work a custom CSI sensor would demand. And because the same model family exists in both USB 3.0 and GigE variants, the transport can be decided more or less independently of the sensor — useful when requirements are still in flux. The resolution span — roughly VGA up to around 24 MP — covers most inspection tasks.
The counterweights are just as real. Connecting over USB3 or GigE means bypassing the Tegra hardware ISP, so debayering and colour processing fall back on the host compute or the camera itself, which on a platform this constrained is not free. On the Nano's single USB 3.0 port, a sustained high-resolution, high-frame-rate stream can approach the available bandwidth ceiling, with measurable CPU load just for buffer handling. And the unit cost sits meaningfully above a CSI module. The honest framing, then, is that the ace earns its place where image quality, global shutter, or a standards-based SDK are genuine requirements — and looks like over-specification where they are not.
The trade-offs that keep recurring
- Bandwidth as the first-order constraint. With one USB 3.0 controller and one GbE MAC, it is worth budgeting ingest capacity before fixing resolution and frame rate, not after. Multi-camera ambitions tend to push a design toward CSI-2's multiple lane sets or toward a higher-tier module.
- The ISP question. CSI-2 cameras get the hardware ISP essentially for free; USB and GigE cameras do not, which quietly shifts colour processing onto compute that is already in demand.
- Integration effort against flexibility. CSI-2 minimises cost and latency but asks for driver and device-tree work on anything non-reference; USB3 Vision and GigE Vision minimise integration risk through GenICam-compliant tooling. Neither is universally right — it depends on how much bring-up time the schedule can absorb.
- Power. In the 5 W mode, bus-powered USB3 cameras and aggressive GPU inference draw from the same envelope, so continuous operation tends to favour the 10 W mode with active cooling.
- Shutter type. Rolling-shutter CSI modules are fine for static or slow scenes; once the inspection target is moving, a global-shutter industrial sensor such as those in the ace line becomes far less optional.
Closing thoughts
The idea worth leaving is that camera choice on the Jetson Nano is shaped far more by the module's single-port I/O and modest compute envelope than by sensor megapixels. The decision is really about matching transport to the character of the application rather than chasing specifications.
MIPI CSI-2 — the Raspberry Pi, Arducam, e-con, Leopard, or Allied Vision Alvium CSI options — is the natural direction when cost, latency, and SWaP dominate, the cabling is short, and the design can either accept a reference sensor or absorb the driver work; the reward is the free hardware ISP. The USB3 Vision route, with the Basler ace family prominent (or the comparable FLIR and IDS lines), fits where industrial image quality, global shutter, GenICam tooling, and fast integration matter more than unit cost or retaining the Tegra ISP. GigE Vision becomes the natural answer when cable reach or a distributed, multi-node topology sets the requirements — within that ~115 MB/s practical ceiling.
As for the platform's edges: the Nano reads as well-suited to single-camera or low-bandwidth multi-camera edge inference with lightweight models, and increasingly out of its depth as resolution, frame rate, or camera count climb. Where that boundary sits is less a fixed rule than the point at which the case for Xavier NX or Orin-class hardware becomes the more comfortable one.
References / Further Reading
- NVIDIA Corporation. Jetson Nano System-on-Module Data Sheet. NVIDIA, 2019–2020.
- NVIDIA Corporation. Jetson Linux Developer Guide (L4T) / JetPack SDK Documentation. NVIDIA.
- MIPI Alliance. MIPI CSI-2 Specification. MIPI Alliance.
- AIA / Automated Imaging Association. USB3 Vision and GigE Vision Standards.
- Basler AG. Basler ace Camera Series and pylon Camera Software Suite Documentation. Basler AG.
